Hey everyone. I am working on an example program with the robot moving checkers on a checker board to figure out how the waypoint offsets work. I am running into issues where I am not quite sure about the offset syntax and things are not working the way I would expect.
From the Documentation I didnt expect to need to create a new waypoint for my “offset points” but it appears that was needed. So I added three offset points in the header and just primed them with Zeros. I was expecting that when I set up the offsets it would pull any numbers not set by the offset from the original point. In this case “zero_square”
from robot_command.rpl import *
set_units("mm", "deg")
Perch = p[112.13211715221405, -91.20772033929825, 140.10269939899445, -177.47084809582782, -0.7044131289825072, -7.300005320292954, "checkerBox"]
zero_square = p[0.0005586846896221687, -0.0006692839633615222, -0.0003718444645528507, -177.47133557050287, -0.7002139076852653, -7.303903641714666, "checkerBox"]
start = p[0,0,0,0,0,0, "checkerBox"]
square_1 = p[0,0,0,0,0,0, "checkerBox"]
square_2 = p[0,0,0,0,0,0, "checkerBox"]
square = 5
# start = zero_square * Pose(z=50)
square_1 = zero_square * Pose(x=square/2, y= square/2, z=square)
square_2 = square_1 * Pose(x=square, y= square)
def main():
set_digital_out(1, False)
change_work_offset("checkerBox")
change_tool_offset("Gripper1")
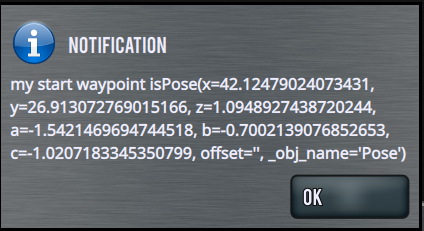
start = zero_square * Pose(z=50)
notify("my start waypoint is" + str(start))
# movej(start)
# movel(start, v=0.25, a=0.3)
# sleep(2.0)
# movel(square_1, v=0.25, a=0.3)
# sleep(2.0)
# movel(square_2, v=0.25, a=0.3)
exit()
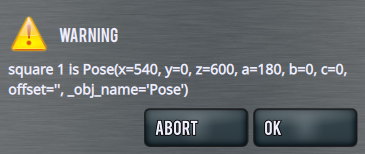
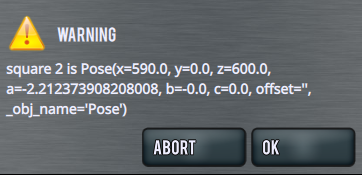
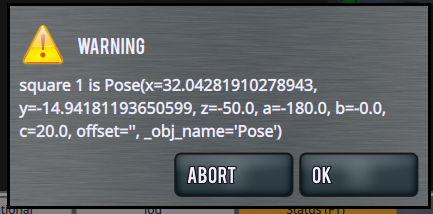
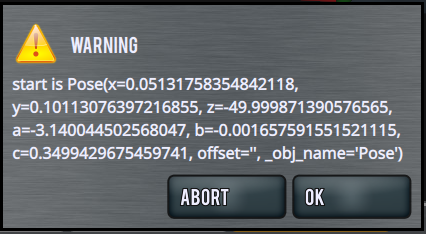
From looking at confluence the start = zero_square * Pose(z=50) line should have set the start pose to be equal to “zero_square” but 50 on Z but when I run the program I get this for the value of the Pose:
Any help would be appreciated.