Students at Peru CSD are creating soft robotic grippers for the ZA6. We would like to control a small DC air pump (24 volt) through the robot control, but I’m scratching my head as to how I can wire it up. The pump will need to switch polarity to either push or suck air.
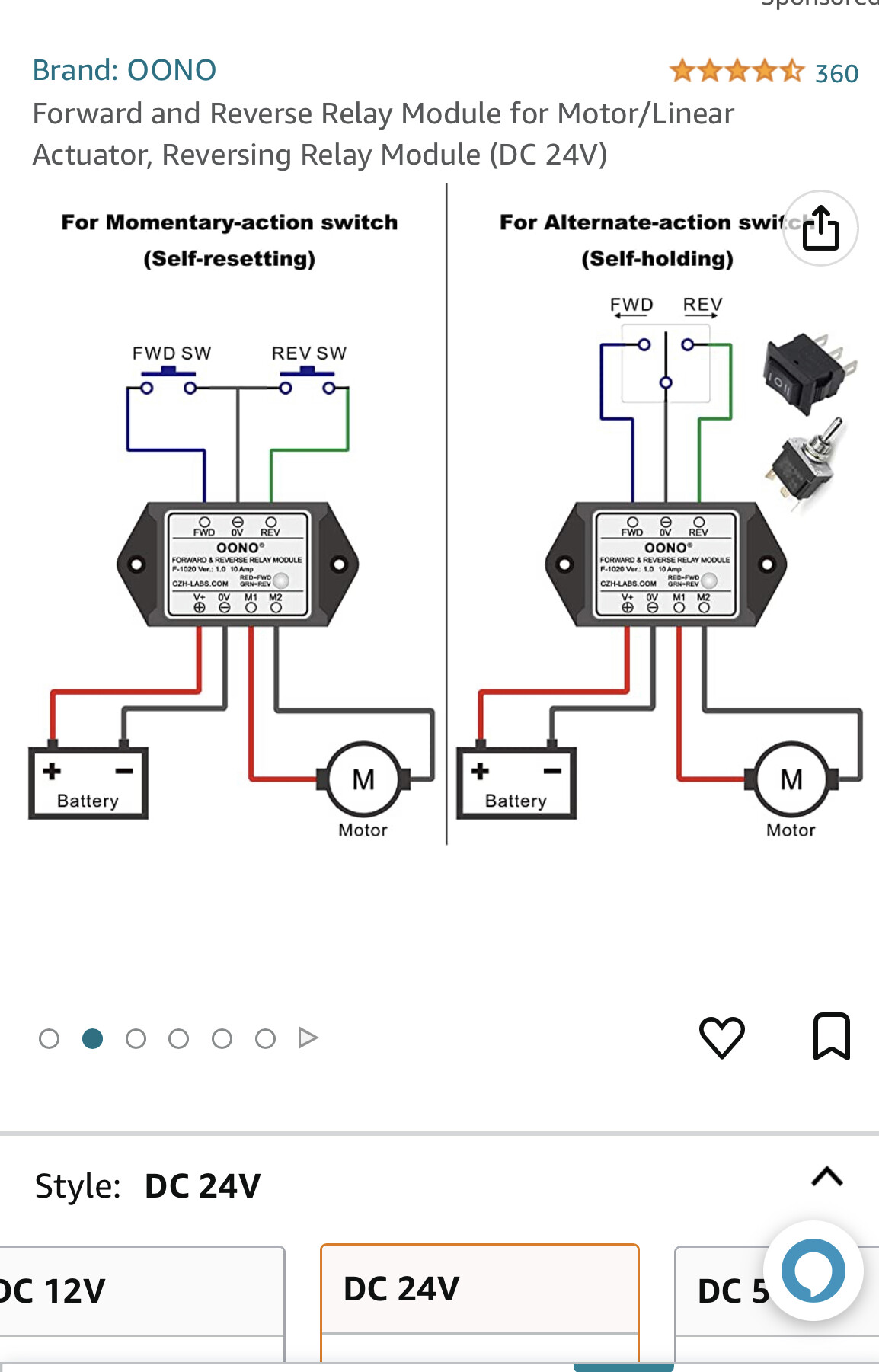
If it’s a matter of needing to be able to close one circuit or the other for forward/reverse, would it work to just use 24V relays controlled by the robot? Basically, replacing the buttons/switches in the diagram with relays?
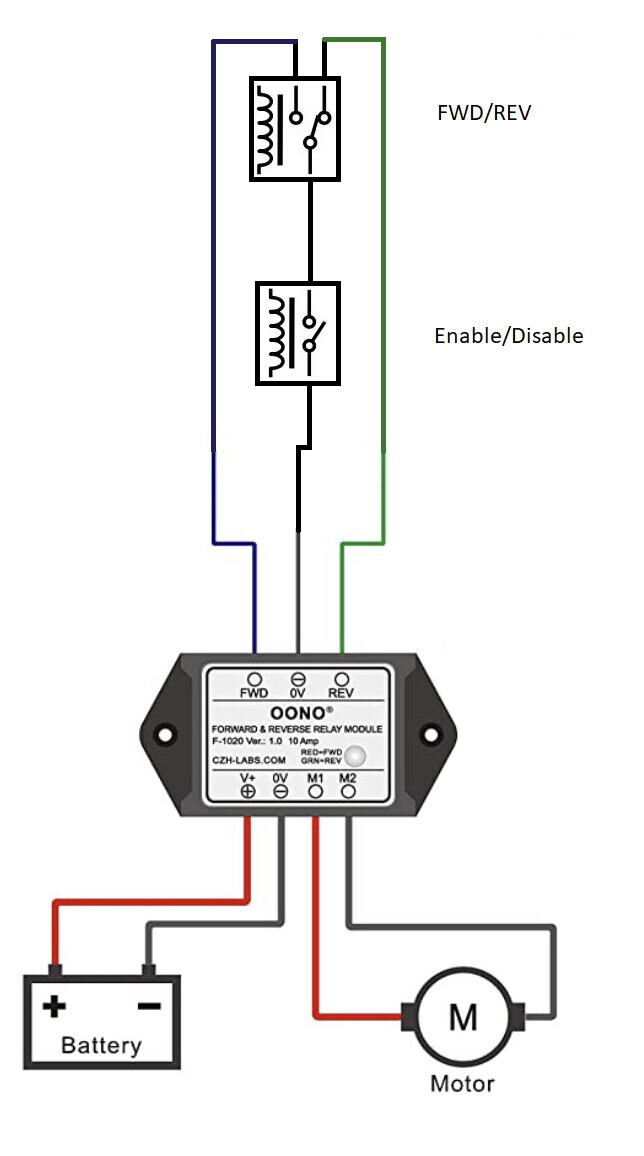
What about something like this? In this setup you can use the hardware you identified and make sure that both directions aren’t called at the same time.