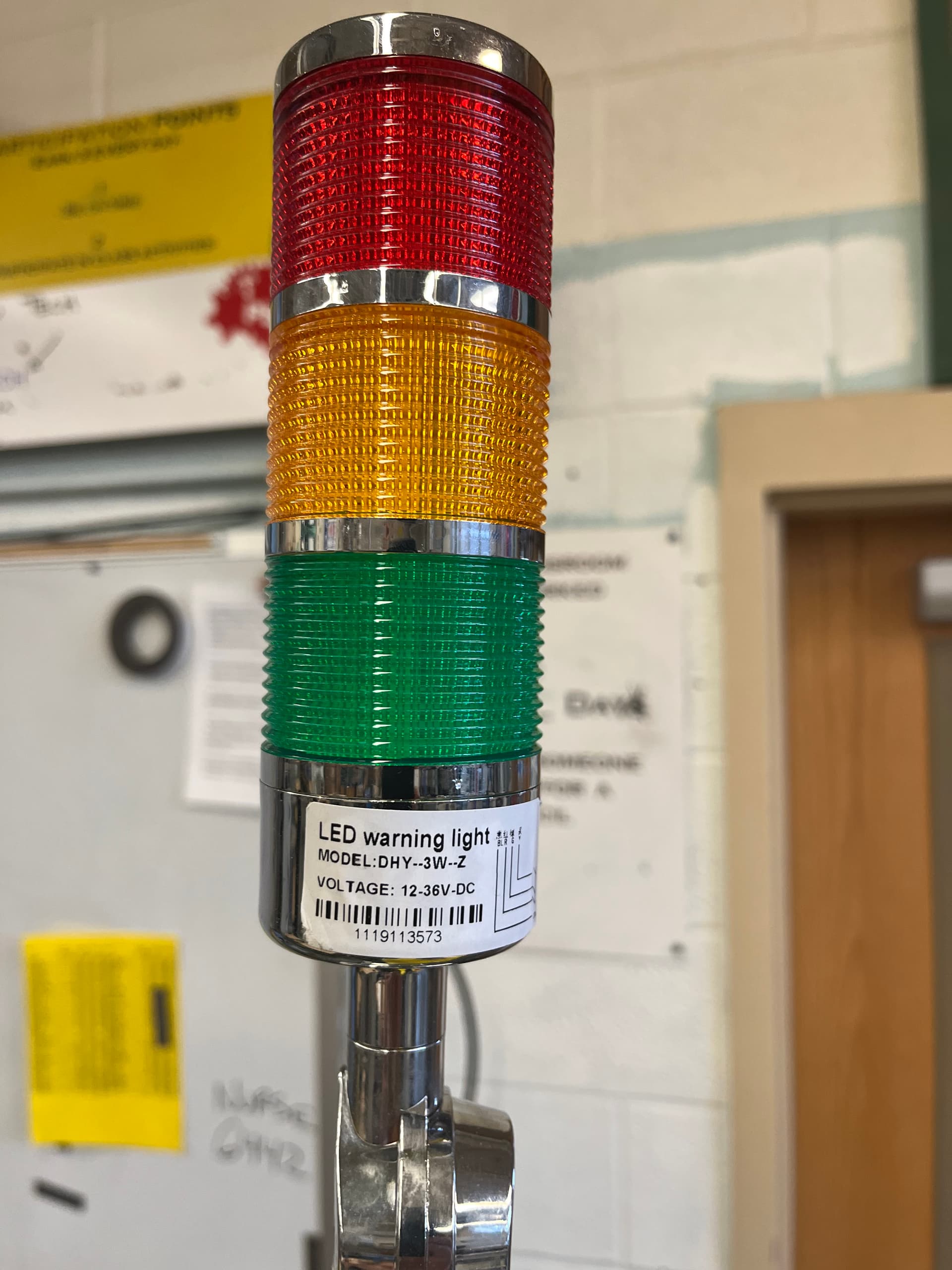
Wired up a stack light for the ZA6. You can turn the light on through the robot program as a visual warning for when the robot is in motion. Used in the classroom, I have students turn the light on to blink yellow while they are jogging the machine.
Wired up a stack light for the ZA6. You can turn the light on through the robot program as a visual warning for when the robot is in motion. Used in the classroom, I have students turn the light on to blink yellow while they are jogging the machine.
I’m curious how you control it? Via the robot program? If so we have recently add a new feature that might improve the “error” behavior, namely on_pause and on_abort methods that are called in case of program pause and program abort/exit.
def on_pause():
pass # code run when program is paused
def on_abort()
pass # code run in case of error or program exit