I wanted to test out using the Za6 to hold a camera to film while I worked on different projects throughout my shop. I wanted to be able to send the robot to frame specific areas that I would be working quickly and predictably. I wanted a project that would allow me to also work with the I/O of the robot with simply hardware.
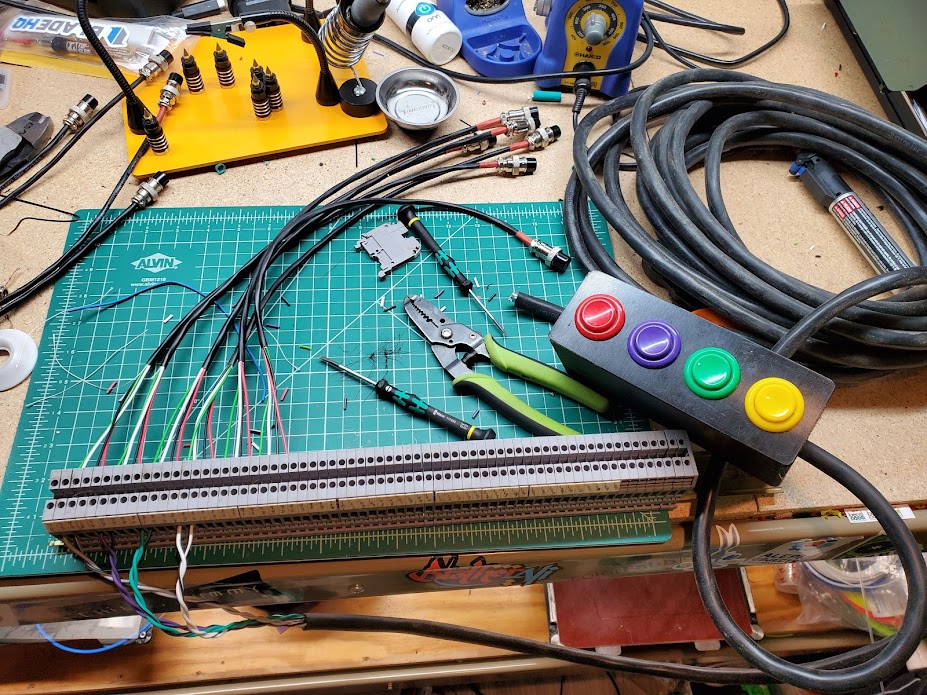
I made a button box from 4 arcade switches and an 8 conductor cable. I also added terminal blocks to the side of the robot cabinet to make it easier to interface with the I/O terminals quickly.
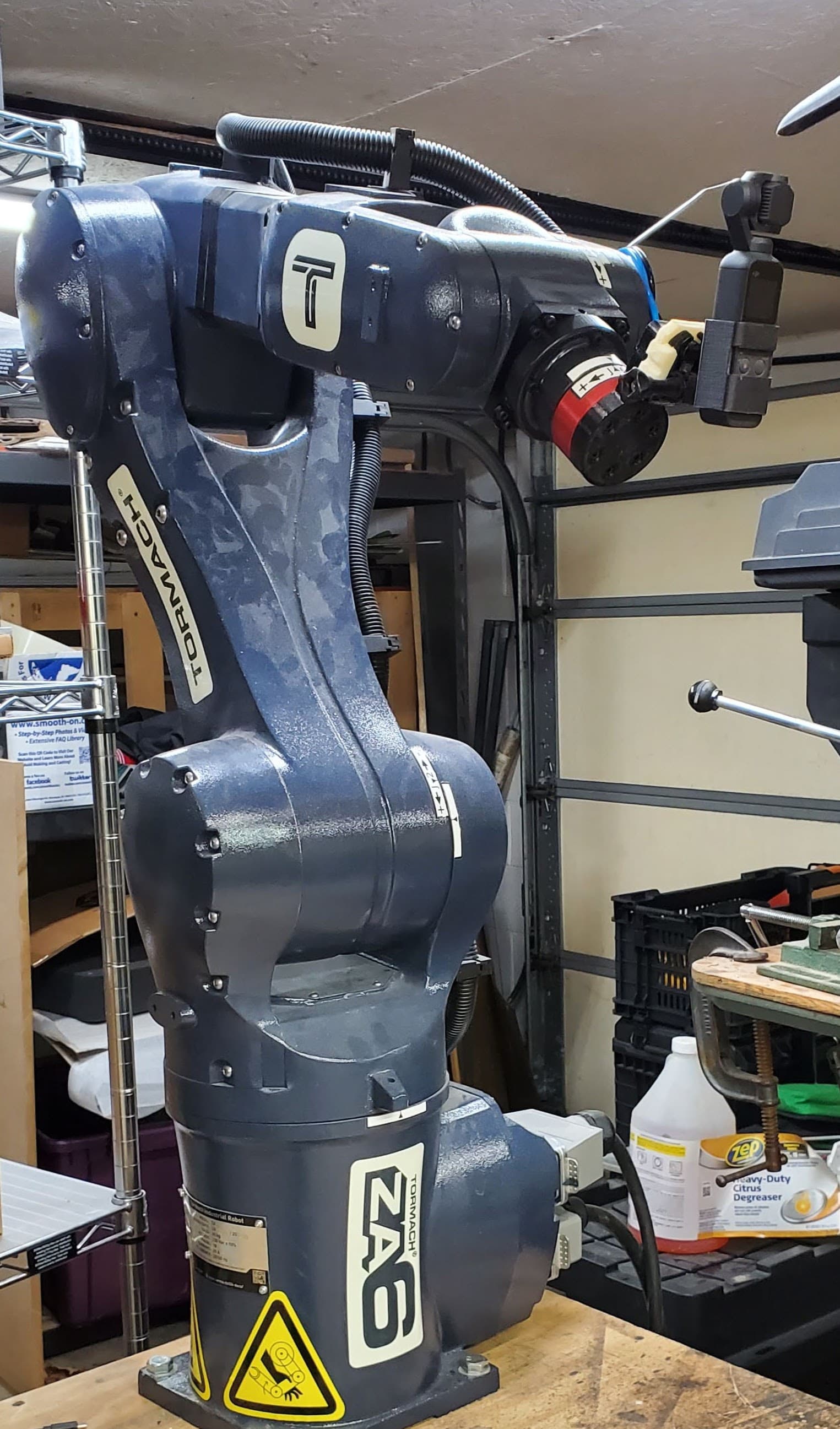
I also made a 3D printed camera mount to mount a DJI Osmo Pocket camera onto the robot using. This made a quick easy to use gimbal that I can control remotely and set to do object tracking or a forced position look. The gimbal makes all the robot movement ultra smooth. I purposely made the face plate mount weak so that if I crashed the camera it would hopefully fail before breaking the camera.
For programming it is a simple set of if/elif statements looking for button presses or combinations to tell the robot what pose to go to.
I did not add the camera to the collision model so I manually had to check the position combinations to make sure it would not collide.