@Rogge - Thanks for having me, excited to be here!
It’s great to hear the models are being updated - I will be on the lookout for those.
In reference to the URDF offsets, (in the files that I have) the flange frame is 100mm away from the axis of rotation for joint 5. In reality, I measure this flange offset to be 117.5mm with the new flange geometry (it would be great to get a confirmation on this number). If this is the case, then all forward and inverse kinematics of the arm are currently not working correctly (hopefully I’m wrong).
Of course, If the user is just setting joint positions of the robot or you have applied the 17.5 mm’s to your tool offsets then there should be no issue.
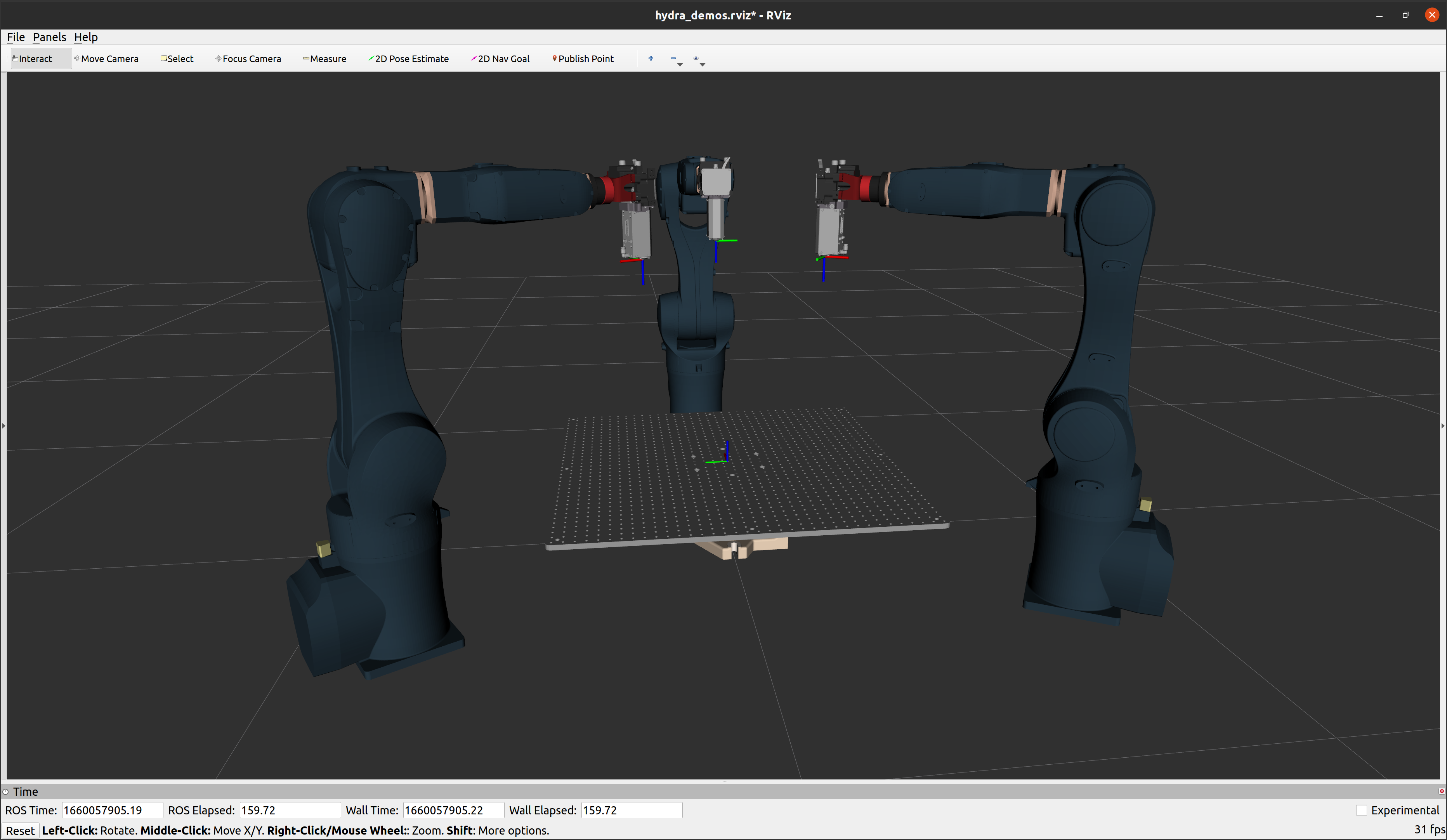
As for my application, I am developing a multi-robot wire-arc/polymer 3D printer (pictured below) as part of my PhD work. I am using the CAD files in my system designs to test the reach of each robot with respect to a positioner table as well as designing peripheral equipment for each robot.
In the meantime, I have developed my own versions of the robot’s URDF and some additional MoveIt kinematics plugins that I would be happy to share with anyone in the Tormach community that’s interested in the ROS side of things. These can be found at the following links
za_description - URDF files and robot models
Notes
- STL files converted to Collada files to prevent the transparency issues with robot links
- Updated flange to match physical robot
- Offset link geometry origins so there is only a single offset between each joint (this helps the ikfast kinematics generator to develop better solutions)
za_moveit_plugins
Notes
- For now this is just an ikfast kinematics plugin
- I have measured this plugin to be approximately 25x faster (per IK call) than the ikfast plugin that came default with the za6. This is a result of changing the urdf file to have a single offset between each joint. I am not sure why this works, but I would be happy to elaborate on this process if you are interested.