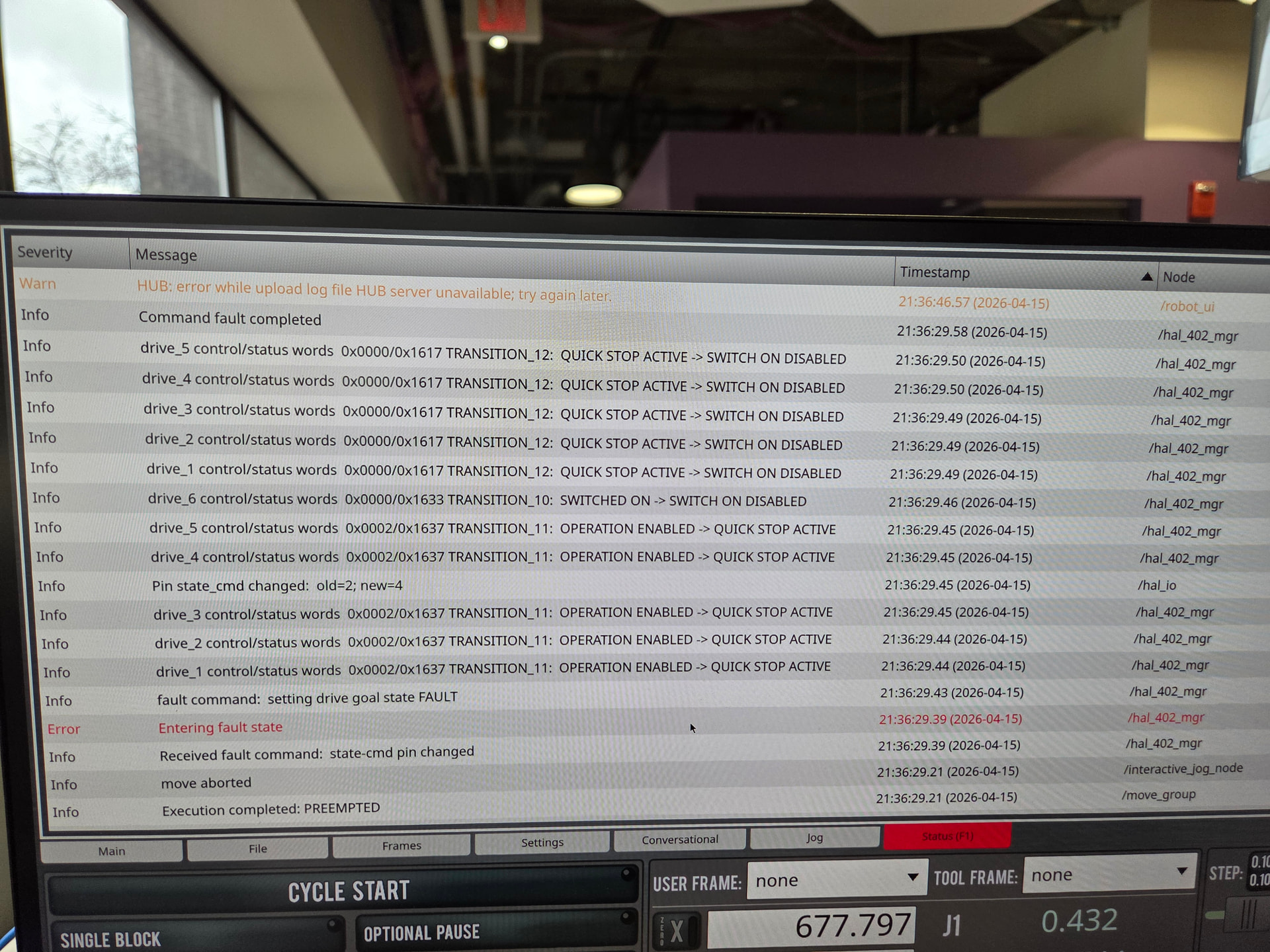
I was helping some students use the robot arm and attach a claw-shaped gripper they had designed, and the robot started having issues. It started faulting even when the light curtains were not being triggered. We were just trying to jog the joints, mainly joints 1, 2, and 3. I looked at the debug log to see if I could figure out what was triggering the fault and got these errors. If anyone knows what this error is or how to prevent it, please let me know!