The following example on Github describes how to retrieve the torque on J2 from inside a robot program and display it to the user: example_robot_programs/hal_examples/read_hal_pin_from_robot_program at main · tormach/example_robot_programs · GitHub
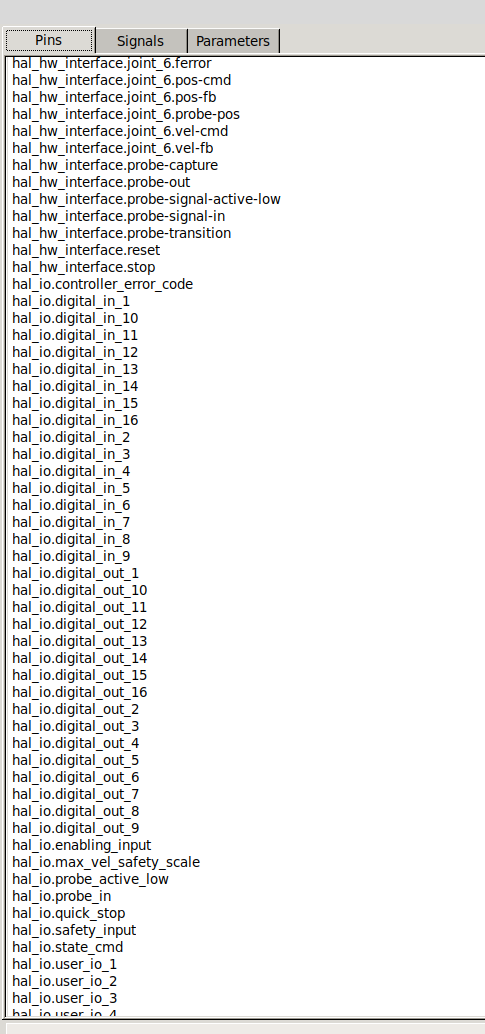
Almost any pin, parameter, signal value is accessible in a similar fashion. A convenient list of available values can be found by launching the graphical HALMeter utility via the button of the same name on the Settings screen: