I posted a new example program on Github showing how to create a ROS publisher to decorate waypoints:
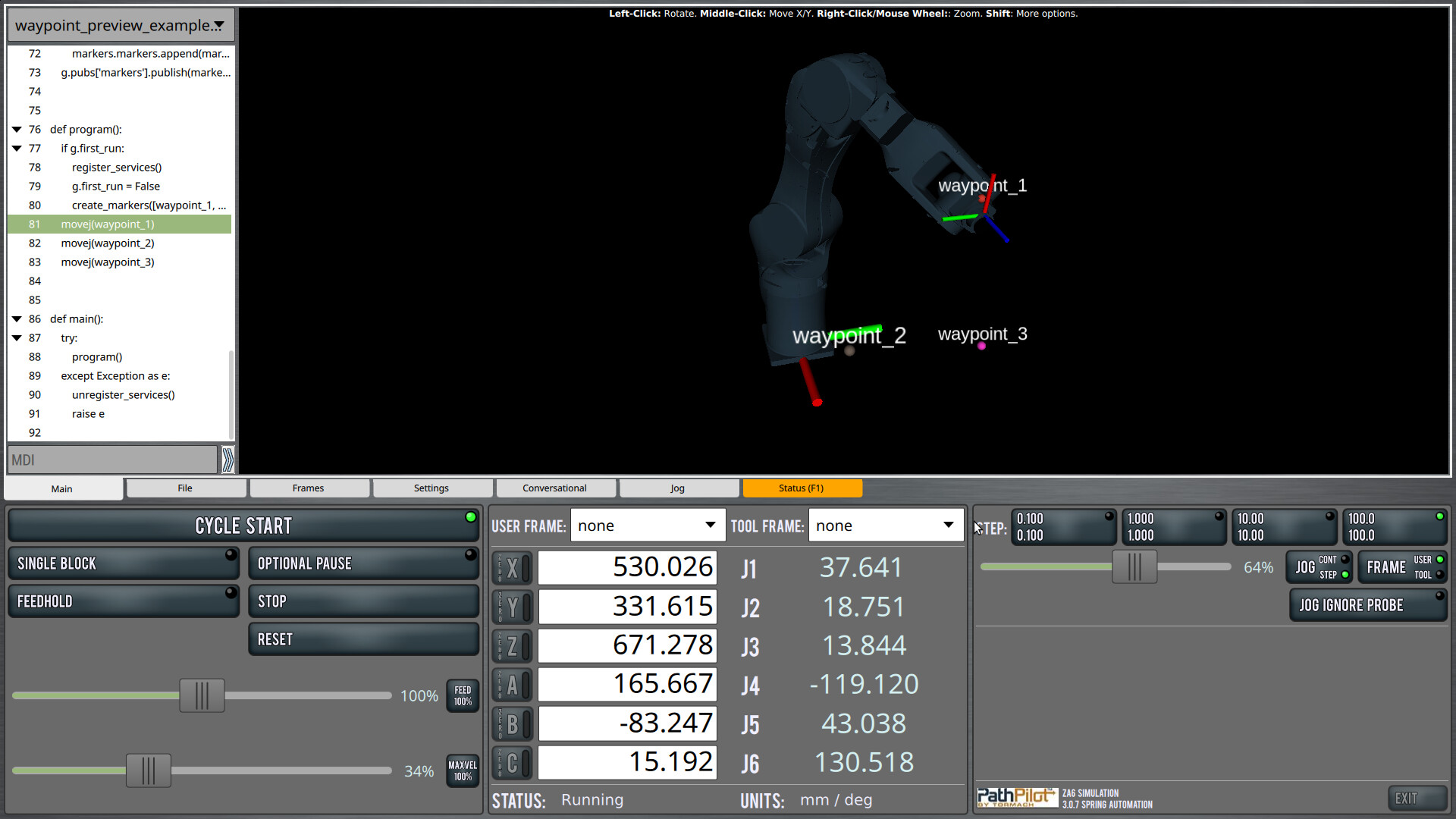
Example code can be found here: example_robot_programs/ROS_planners/waypoints at main · tormach/example_robot_programs · GitHub
I posted a new example program on Github showing how to create a ROS publisher to decorate waypoints:
Example code can be found here: example_robot_programs/ROS_planners/waypoints at main · tormach/example_robot_programs · GitHub