Hi,
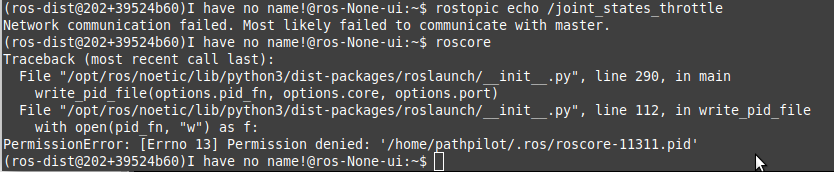
I’m trying to use the online documentation for the API Access Levels (https://tormach.atlassian.net/wiki/x/G4BAhg). More specifically, I would like to access the ROS publisher topics for the robots’ joint_states_throttle or pose_states_throttle. I’m having no success. It’s probably something simple, but I can’t figure it out.
Attempting to follow the documentation, if I open a terminal (outside of PathPilot) and literally enter “docker exec -itu 1000:1000 ros-dist-ui bash -i”, it will return “Error: No such container: ros-dist-ui”
If I try “docker exec -itu 1000:1000 noetic bash -i”, it will return “Error: No such container: noetic”
(NOTE: I’m under the impression that it’s ROS Noetic)
Do I open a terminal (somewhere?) and enter this command, or do I enter it somewhere in the PathPilot interface? The documentation states “Run the following command on the robot computer to open a terminal in the robots Docker container.” Where does this command need to be entered, specifically? And anything else I should do to be able to subscribe to the publisher node?
Thanks for any help you can provide,
Mike